【 研究紹介 】
全方向移動ロボット
複雑で狭い環境における物体の搬送では,移動ロボットの移動性の向上が求められる.そこで,高度な移動性を有する全方向移動ロボットを用いた研究を行っている.現在は,メカナムホイールという特殊な車輪を利用した全方向移動ロボットを使用している.
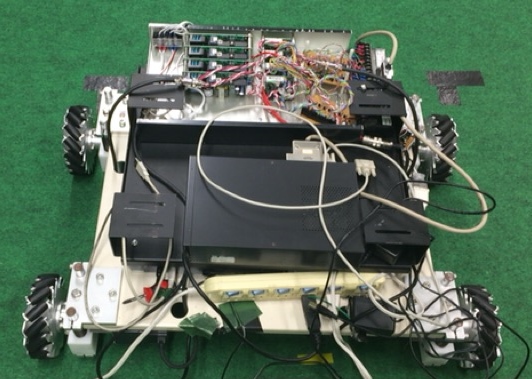
メカナムホイール付き全方向移動ロボット
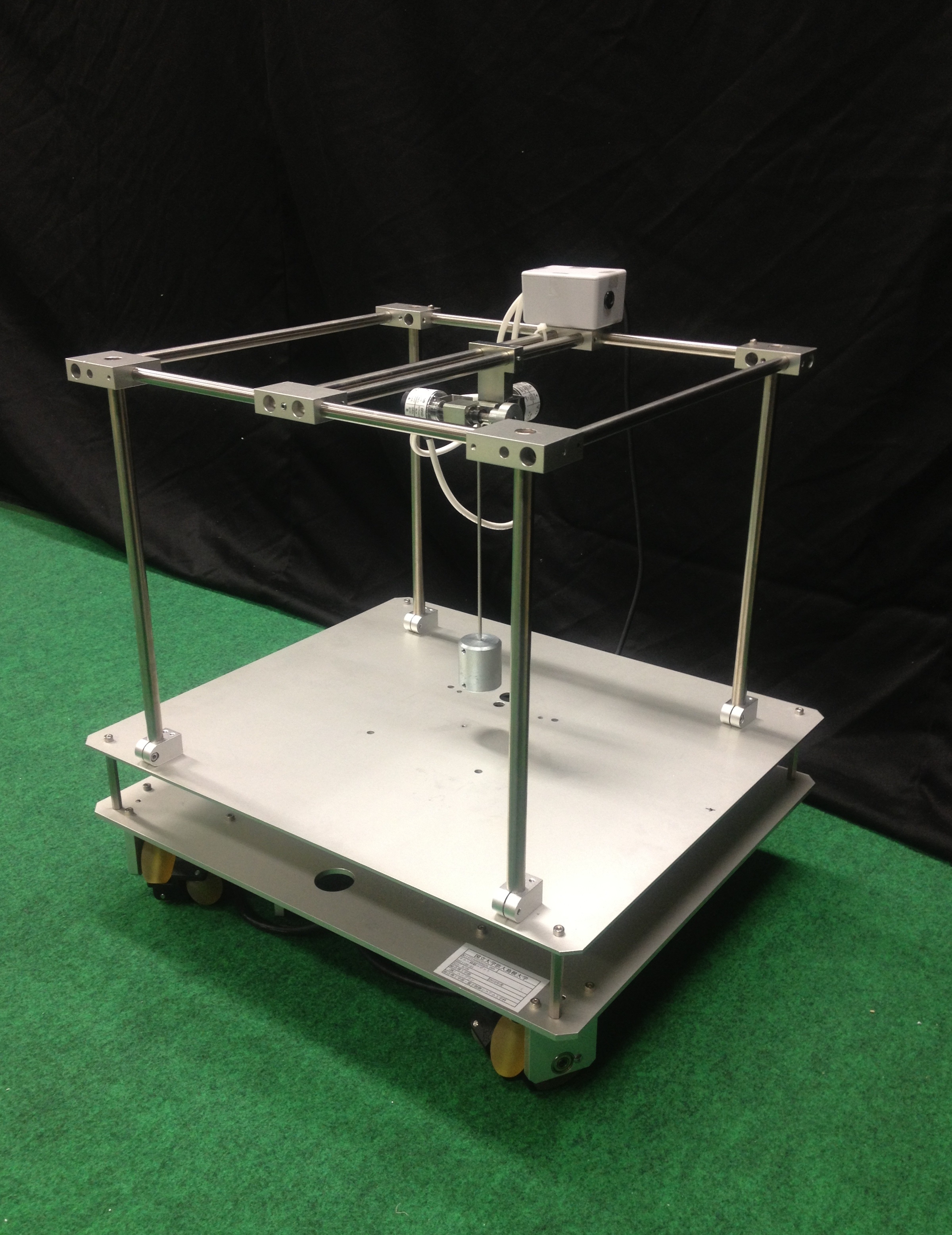
球面振子を搬送する全方向移動ロボット
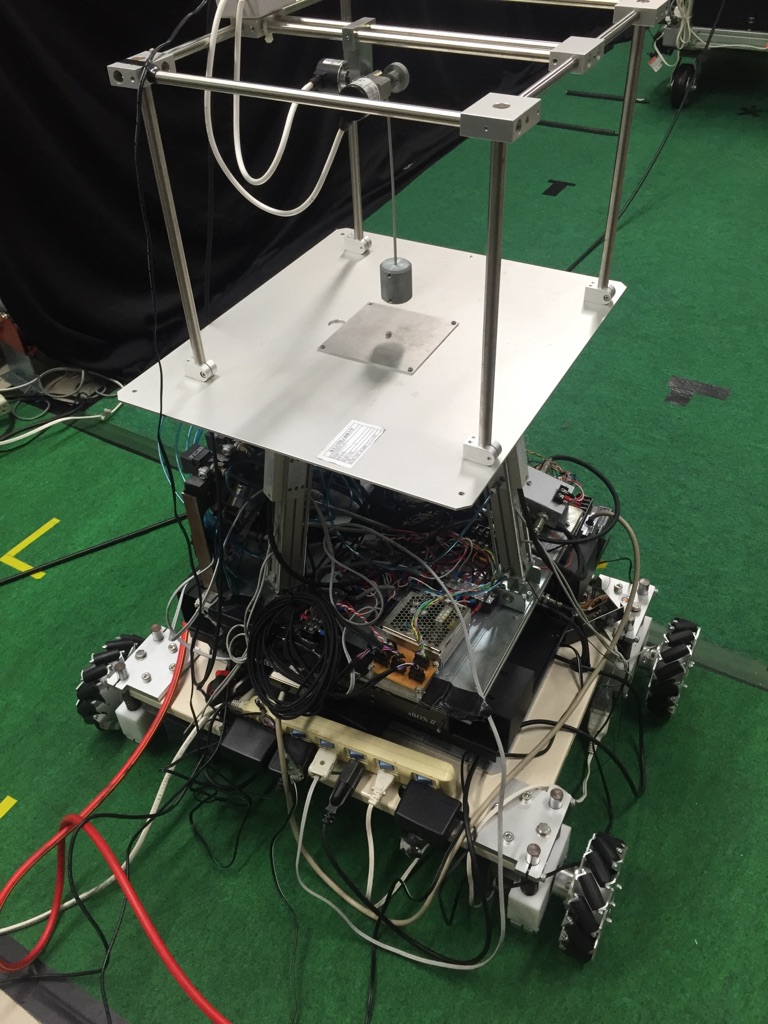
球面振子を搬送するアクティブ吸振器付き全方向移動ロボット
メカナムホイール付き全方向移動ロボット
- ・ 自己位置・姿勢推定ならびに軌道追従制御
- 移動ロボットに搭載した,加速度センサとジャイロセンサ値,ならびに駆動輪の回転角度を用いて移動ロボットの位置ならびに姿勢を高精度で推定するアルゴリズムを構築し,移動ロボットを目標軌道に追従させることを行っている.センサ値に含まれる誤差や駆動輪のスリップがあるばあいにも,正確な位置と姿勢を推定することが必要となる.
- ・ 制振搬送制御
- 移動ロボットによる搬送作業の自動化を考え,搬送物の振動や荷崩れを考慮した搬送経路設計ならびに障害物回避を行っている.搬送物としては,振動しやすい球面振子(仮想搬送物)や液体タンクを対象としている.移動ロボットの適切な速度制御と経路設計により,搬送物を揺らさずに搬送することが可能となる.障害物を回避する際にも搬送物の振動を考慮した回避アルゴリズムを構築する必要がある.
球面振子を搬送する全方向移動ロボット
- ・ アクティブ吸振器による制振制御
- 移動ロボットの回避行動によって発生する搬送物の振動を制振するアクティブ吸振器を用いた研究を行っている.アクティブ吸振器を用いることにより,不整地や傾斜面上を移動ロボットが走行した際にも搬送物を安定に,かつ,安全に搬送することが可能となる.ここでは,パラレルリンク型のアクティブ吸振器を用いている.
球面振子を搬送するアクティブ吸振器付き全方向移動ロボット
アクティブ吸振器
パラレルリンク機構を利用したアクティブ吸振器の開発を行っている.パラレルリンク機構はベース部に全駆動モータを設置することができ,移動部分の軽量化が図れるので高速で高精度な位置決めを行うことができる.また,自由度が増しても積層型のアクチュエータに比べてコンパクトにできるという利点も持つ.このアクティブ吸振器を移動ロボットや搬送台車に搭載し,液体タンクの制振搬送制御を行っている.
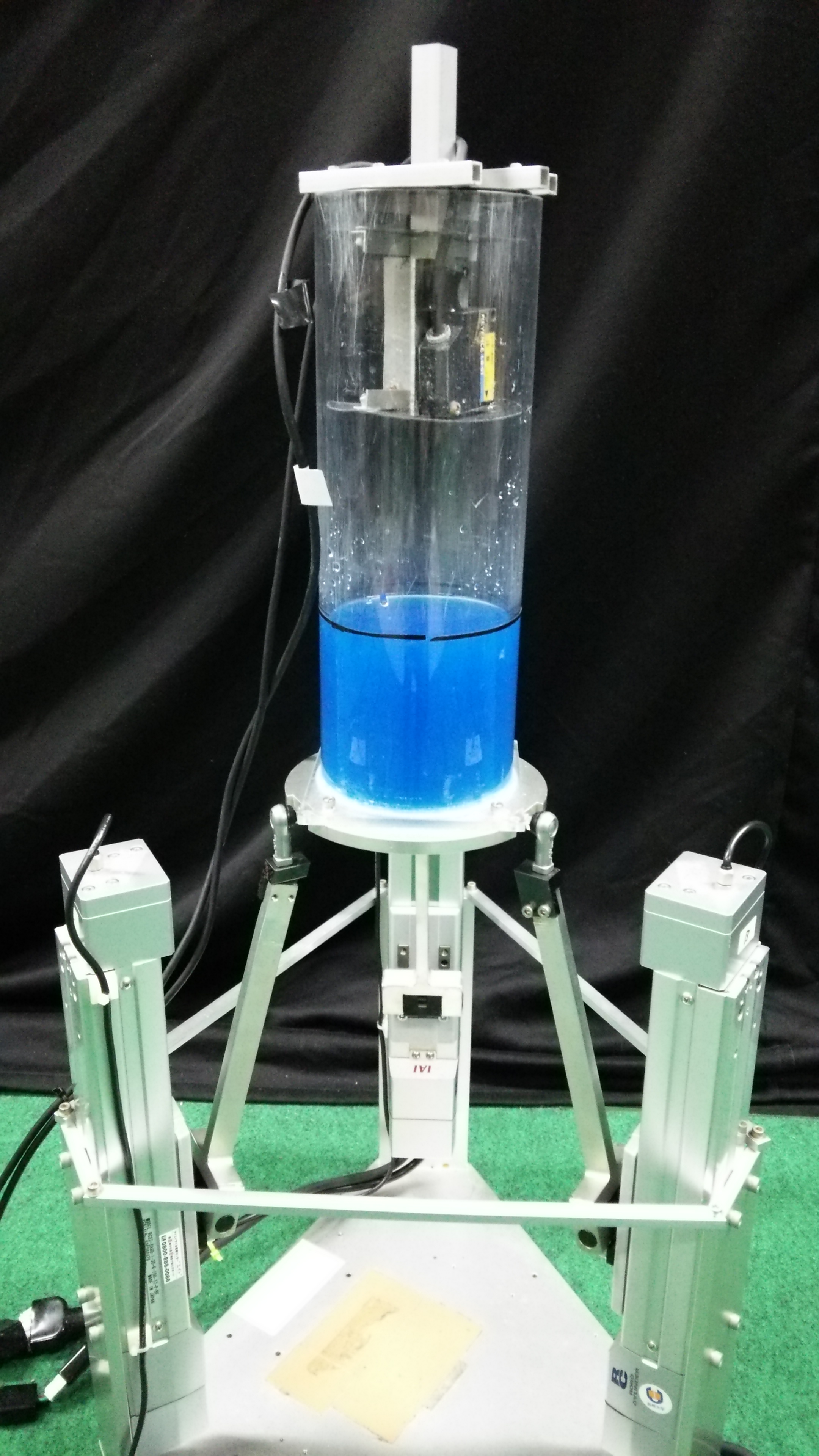
3自由度パラレルリンク型アクティブ吸振器
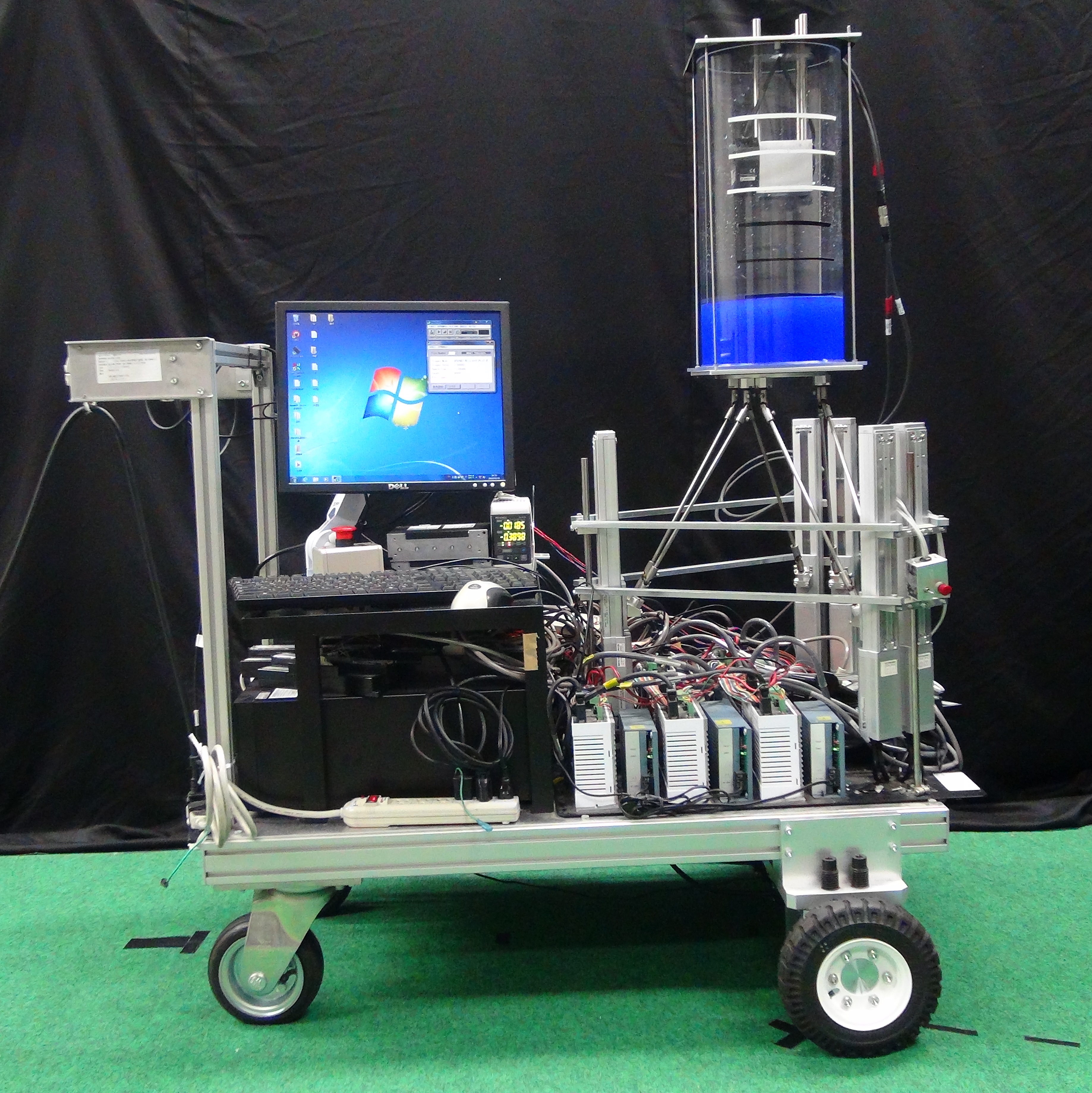
6自由度パラレルリンク型アクティブ吸振器付き自動搬送台車
- ・ 3自由度パラレルリンク機構
- 直動アクチュエータを3本使用し,アクチュエータと搬送台をリンクで並列に結合したものである.3つのアクチュエータの動作によって,搬送台のピッチ角,ロール角,ならびに鉛直方向変位の3自由度を独立に制御することができる.この動作によって,搬送物の水平化制御や制振制御を行う.
3自由度パラレルリンク型アクティブ吸振器
- ・ 6自由度パラレルリンク機構
- 直動アクチュエータを6本使用し,アクチュエータと搬送台をリンクで並列に結合したものである.6つのアクチュエータの動作によって,搬送台のピッチ角,ロール角,ヨー角,水平方向変位,ならびに鉛直方向変位の6自由度を独立に制御することができる.多くの自由度を持つことによって,より高度は制御が可能となる.
6自由度パラレルリンク型アクティブ吸振器付き自動搬送台車
ストレスレスな操作方法
クレーンなどの機器を操縦する際,人には好みがあり,自分の好みに合った操作性でない場合,ストレスを感じる.そこで,人それぞれの好みに即した操作性が得られるように自動的に調整する方法を研究している.
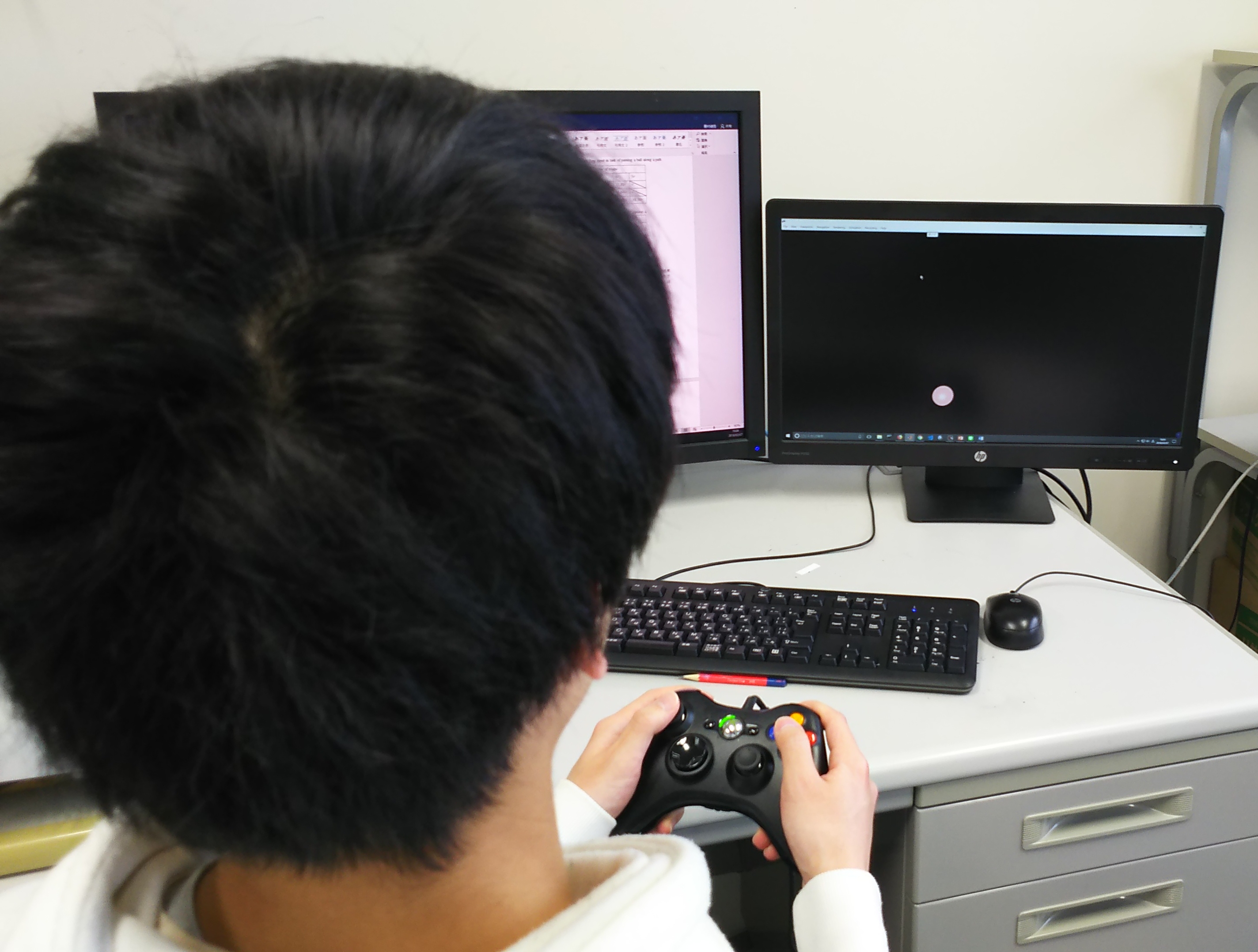
PC上のシミュレーションモデルによる操作
PC上のシミュレーションモデルによる操作
ロボットジェスチャー
ロボットのジェスチャーが人にどのような感情を与えるのかを研究している.ロボットと人との円滑なコミュニケーションを図る上では,言葉だけではなく,表情やジェスチャーも重要になる.将来的には,ロボットがその状況に相応しいジェスチャーを自ら創作できるようにしたいと考えている.
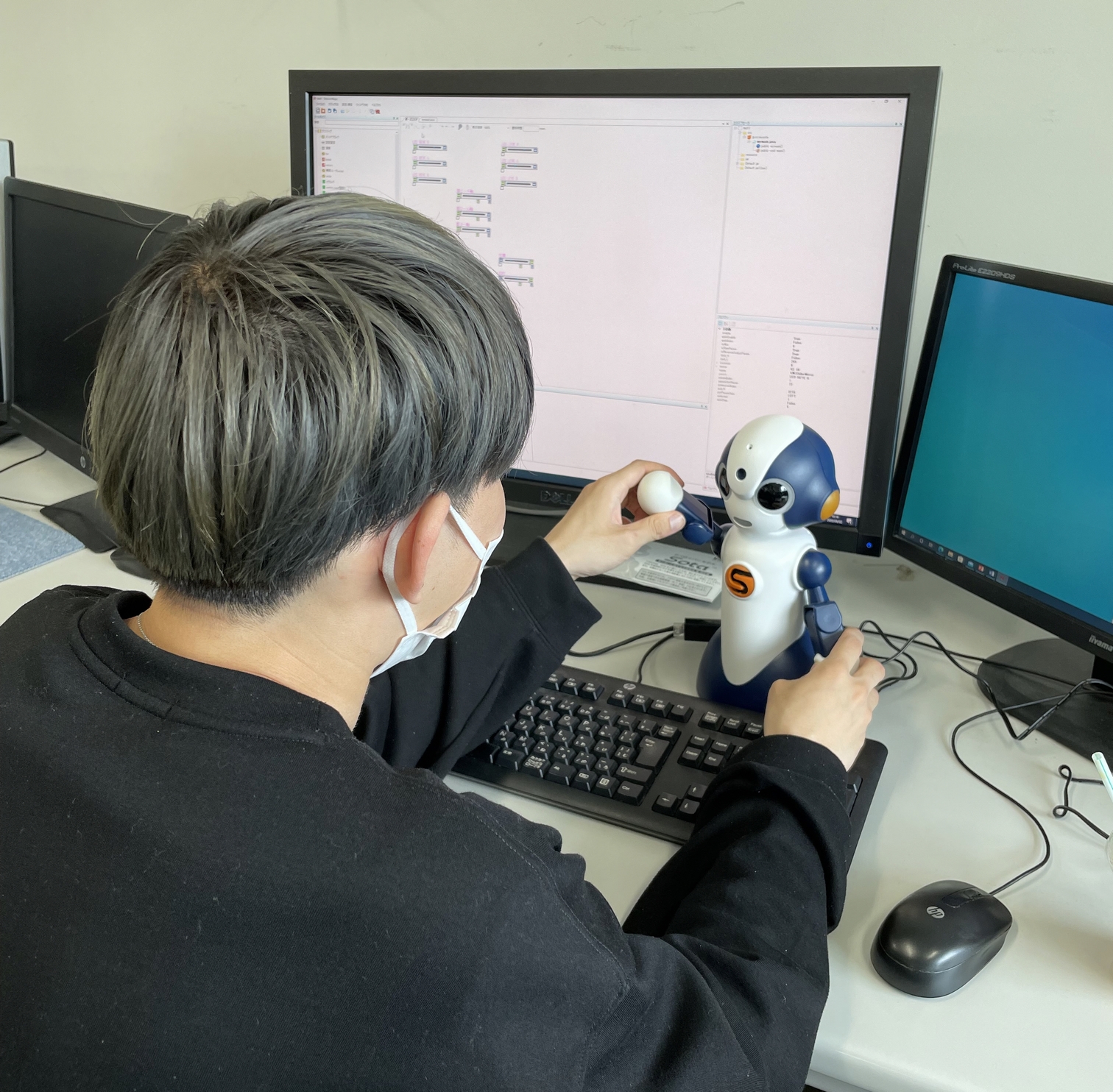
人型ロボットのジェスチャー作成
人型ロボットのジェスチャー作成
| < HOME | || | 研究 | || | Members | || | 過去の研究 | || | 研究業績 | || | 受賞歴 | || | Link | || | 授業資料 | || | PageTop▲ |
|---|
© 2005 島根大学 ロボット工学研究室